工程师的摇篮 聊FSEC/FSAC赛车前沿技术
● 没有车手的赛车
以FSAC的冠军——北京理工大学纯电动方程式赛车队的“战车”为例,其实无人驾驶方程式赛车的研究开发,大多数都是建立在电动方程式赛车上的,各位可以把FSAC看成是FSEC的进阶版,也就是我们常说的“从FSEC到FSAC”。

简单来说就是:学生们通过给电动方程式赛车加上——环境感知、智能决策、执行控制三大系统,从而让方程式赛车自己按设定的路线自己跑起来。

最有看头的我想应该就是环境感知系统了,它相当于赛车的“眼睛”,是由激光雷达、摄像头和高精度GPS组成;而智能决策系统相当于赛车的“大脑”,处理“眼睛”接收的信息进而分析处理;执行控制系统相当于“四肢”,用于横纵向控制。

激光雷达具有很高的测距精度,基于采集的原始点云信息,进行处理区域的划分,使最终需要处理的数据量远低于原始值。在此基础上采用Point Cloud Library (PCL点云库方法做后续的处理,对原始数据进行滤波、去离群点、投影、聚类、取中心点等一系列流程,最终提取出锥桶在坐标系中的坐标。
看到这里,或许有网友疑惑了,为什么车头的传感器只有一台激光雷达?其它的诸如超声波雷达、毫米波雷达就怎么就不装上车?针对这些问题,笔者咨询了吉林大学吉智无人方程式赛车队队长,他说一方面是因为超声波的传输速度易受天气情况和方程式赛车的车速影响,处理测距时有可能跟不上车辆的实时变化,另一方面是超声波散射角大,导致方向性较差,不利于运用到方程式赛车上。

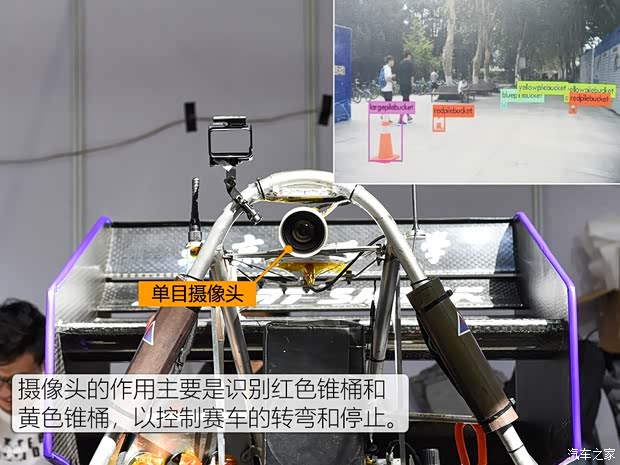
摄像头主要识别红色锥桶和黄色锥桶,以控制赛车的转弯和停止。首先采集车前方图像,采用中值滤波方法,极大的保留了图像边缘信息,有效去除了各种小噪点,此外所采用的HSV颜色空间,方便进行颜色空间转换,我们分割图像的阈值范围,从而保留需要的颜色。其次,对阈值分割后的图像进行形态学开运算和闭运算,得到锥桶区域以及与锥桶形状接近的区域。最终采用了区域的面积、方向、圆度特征,准确的分离出红色大锥桶和黄色锥桶。
借助高精度GPS,赛车可以记录下每一次行驶的轨迹,并按照之前的路径高速行驶。在此之上,决策系统是基于ROS(Robot Operating System)操作系统开发而来,针对每一比赛项目使用C++编程语言设计和编写相应的控制程序并封装在同一个ROS包下。通过运行各个不同节点,可以快速启动并且运行不同控制序、数据传输以及处理速度。

总结:
同样是作为大学生方程式大赛的系列赛事(包含BSC巴哈赛、FSCC内燃机赛、FSEC电动车赛、FSAC无人车赛),FSEC相比起FSCC,算是一次进阶,它要求赛事参与者掌握的技术更高,主要源于电源管理系统、电池技术、电控系统的综合设计与控制,即使在大学和企业界都并非完全成熟的技术,赛事参与者需要边学边做。而FSAC相比起FSEC,则又是一次进阶,毕竟无人驾驶技术具有超前和跨界的双重特点,尚无一家车企来得及对此技术做出完整布局,我想,随着赛事参与者经验地累积和不断地学习探索,或许这个赛事确实是一个青年工程师的“摇篮”,为祖国输送一批又一批的专业性人才。(图/文/摄 汽车之家 苏炜祺 图片来源:蔚来官方)