上亿元研发费的自动驾驶不如打滴滴?
[汽车之家 技术] 智能汽车表现的区别在于能否针对外界环境,做出迅速且准确的判断与反应,也就是咱们常说的能不能用、好不好用。
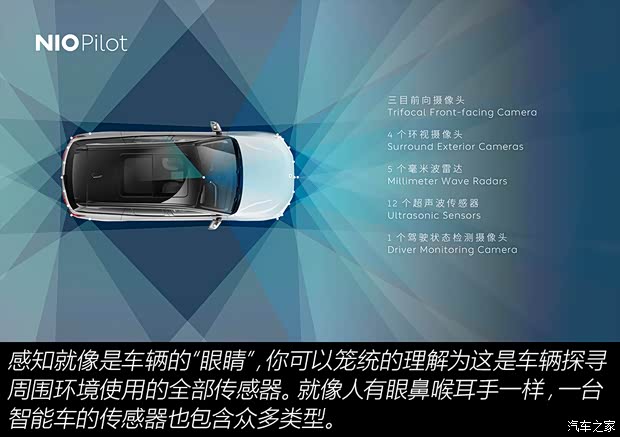
显然能否及时、全面、准确的收集信息,会对之后的一系列动作产生最直观的影响,因此这期咱们就看看这个智能驾驶硬件三剑客之一的感知器。

先来说说这三剑客,如果把一台智能车看做机器人,那它的动作都是通过“感知”、“决策”、“执行”这三剑客进行设计的。
今天常见的传感器有摄像头、超声波雷达、毫米波雷达、激光雷达这四种,那些位高权重的豪华品牌也会加入红外成像设备,这个相对少见暂且不提。
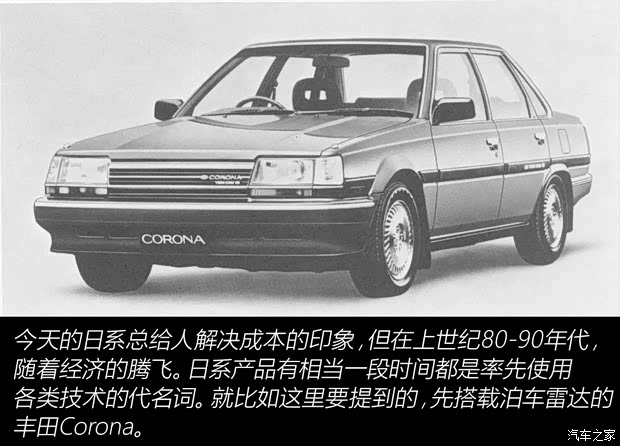
感知硬件的上车当然不是一蹴而就,如果翻看它们的发展历程,不难发现硬件虽小,但却是一部反应汽车科技历程的进化史。
整体时间轴的开始大概从千禧年开始。2000年左右,斯巴鲁、丰田和宝马率先推出智驾相关的主动安全功能。但是当时采用的感知硬件比较单一,斯巴鲁只搭载了双目摄像头,而丰田则以单个毫米波雷达当做主传感器。实现的功能也相对有限,主要有车道保持,和ACC等。

5年之后,更多车企开始进入主动安全领域,硬件和功能也有了加强,比较有代表性的是以安全为核心卖点的沃尔沃。它采用了单目摄像头+毫米波雷达融合的方案,实现了ACC自适应巡航、碰撞预警以及车道偏离预警等功能,这些技术不单是当时沃尔沃的最新安全技术,在汽车界也处于领先地位。

时间来到2010年,这五年属于稳定发展期,虽然没有太多颠覆性的新技术出现,但各个品牌在有条不紊的展示自家的智驾系统,感知硬件方面,有的车企为了成本继续探索单摄像头方案,有的车企则偏向多目摄像头方案。

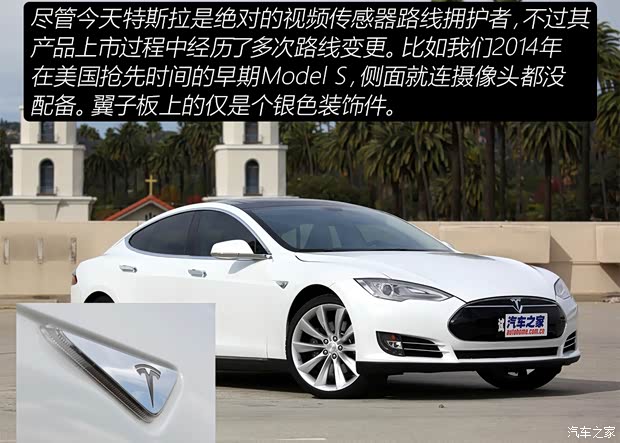
时间继续向前,2016年随着特斯拉Autopilot 2.0发布,智能驾驶开始提速,重视觉感知的多颗摄像头+毫米波雷达+超声波雷达路线开始出现。我们第一次发现侧翼子板、B柱也能布置摄像头,IMU惯性测量单元竟然也会在车辆上安装,当然实现的功能也更加丰富,在高速上车辆会自动跟随车流,自动变道等等。

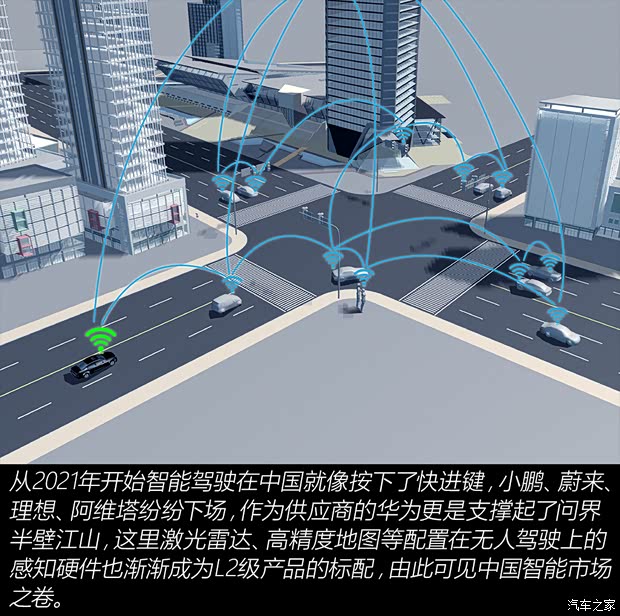
2021年,蔚来ET7正式上市。作为国内首个搭载激光雷达的车型,它能够实现高速的自动导航辅助,同时在感知硬件上也配备了多颗高精度摄像头,毫米波雷达,超声波雷达,另外高精度地图也开始上车。
同年小鹏、与华为合作的极狐同样也官宣或推出了自己搭载激光雷达的车型,中国车企的智能车开始露出自己的獠牙。
不止硬件,智驾的路线其实也充满了变数。首先是高精度地图的不确定性。随着自动导航辅助功能的不断迭代,不同车企在高速NOA上的表现正迅速追平,大多数车企在高速NOA的策略都通过感知硬件、车身定位系统,配合高精度地图实现“自动”驾驶。

相比高速场景,城市场景最大的问题在于道路情况更为复杂,尤其是道路的维护、修建,以及重要单位周边的信息安全等问题,使得高精度地图处于一个尴尬的境地。第一个尴尬点在于更新频次跟不上,频繁的道路修建给高精度地图的采集带来的巨大的成本压力,这个成本压力最终会平摊到车企头上,对车企来说也是巨大的负担。
无独有偶,激光雷达同样也受到成本和技术路线的困扰。这两年刚上的激光雷达路线,在最近一年又开始出现去激光雷达的声音。不过相比去高精度地图,激光雷达由于成本的不断下降以及本身特有的产品特性,用不用激光雷达作为智驾的必备硬件,需要各家车企理性抉择。
写在后面的话:
对咱们普通用户而言,只希望得到一套好用且便宜的解决方案,反推到研发端感知硬件如今也划分出了,维专不破的激光雷达派,和倡导河润泽及的视觉主导派。当然,在很长一段时间里,成本与效果的天平仍无法稳定,咱们下期就说说当下最火的激光雷达。(文/图 汽车之家 冷晓阳 唐朝)
