小鹏汽车科技日:新构型飞行汽车曝光
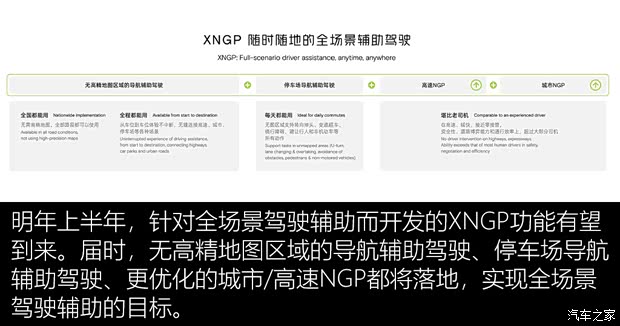
● 全场景驾驶辅助驾驶或将在明年落地
根据小鹏汽车的发展路线图,2023-2025年将会是智能驾驶系统竞争下半场的开局,全场景辅助驾驶将会成为商家们抢占的首个制高点。从2025年开始,技术将会向全面自动驾驶以及无人驾驶进发。

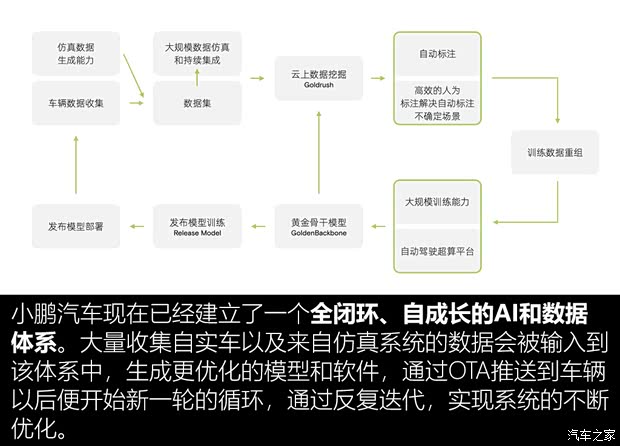
XNGP全场景驾驶辅助系统之所以功能强大,有三大原因,一是它建立在算力强大的英伟达Orin平台之上;其次是小鹏经过一整年的努力,自动驾驶软件得到进一步优化;最后就是完成了全闭环、自成长的AI人工智能以及数据体系。

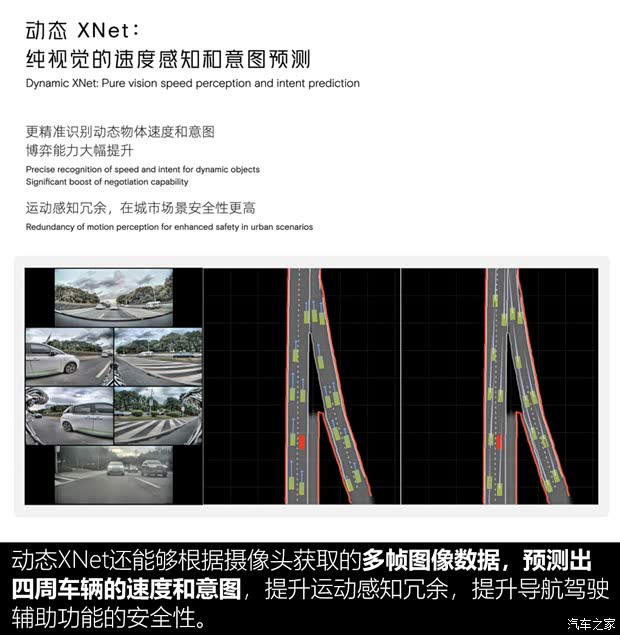
XNet相比起小鹏以前的多相机单帧的方式输入模型,后期在进行数据融合的方案,具备更好的实时性、精确度,即静态环视感知能力更优。
有鉴于城市道路复杂多变的特点,道路特征变更频率高(道路磨损或改道等),XNet采用了重感知轻地图的策略。凭借英伟达Orin平台的强大算力来拓展XNet的感知能力边界,从而战胜复杂多变城市道路带来的挑战。基于XNet的XNGP功能和XPILOT功能的一个明显区别就是是否依赖于高精地图数据。
在人工智能技术爆发的时代,一个卓有成效的网络架构也就意味着巨量的数据数据以及庞大算力的消耗。

好在方法总比问题多,小鹏开发了全自动标注系统,过去2000人年的标注量,现在可以在16.7天内完成,而且自动标注质量更高、信息更全、产能更大。

受益于扶摇超算中心600PFLOPS的算力加持,动态XNet的训练时间由过去的276天缩减到现在的11小时,效率提升超过600倍。

XNet是基于Transformer神经网络模型的,小鹏通过对Transformer算子进行完全重构、主干网络优化等措施,实现了算力利用率的大幅提升。具备这种优化能力的公司,在业内并不多见,这一方面是得益于小鹏一直以来坚持的全栈自研策略,另一方面则是在英伟达Xavier平台上开发驾驶辅助系统软件的技术积累。Xaviver和Orin是英伟达推出的两代智驾域控制器,它们本质上都是基于英伟达的CUDA计算架构。小鹏在Xavier平台上的开发经验,是其在Orin平台上取得快速突破的重要原因之一。
这个体系中,黄金骨干模型的地位至关重要。黄金骨干模型的工作就是遇到边角案例(corner case)时(如满载废品的三轮车等异形车辆),自动把数据上传到云端,触发数据的定向收集,利用收集到的数据训练模型。黄金骨干模型的设立使得发布模型训练和XNGP技术网络的性能迭代优化解耦,即遇到边角案例时,只需要对基干网络进行优化即可,无需从头开始训练网络,实现训练效率的大幅提升。
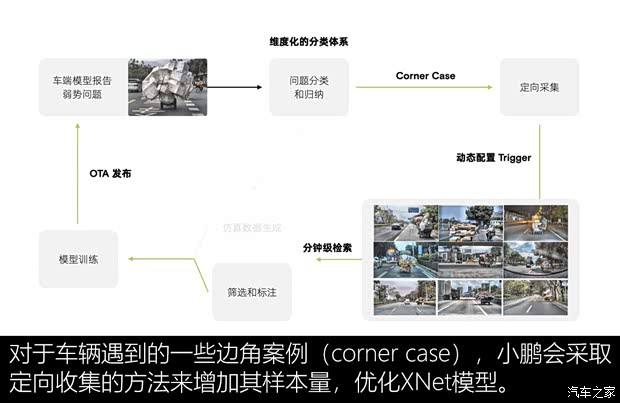
小鹏在已经上路的10万台小鹏车型上部署了超过300个触发器,可以根据需要获得各种各样边角案例的样本。而海量的样本数据,尤其是边角案例样本数据是一个优秀XNet得以诞生的基础。
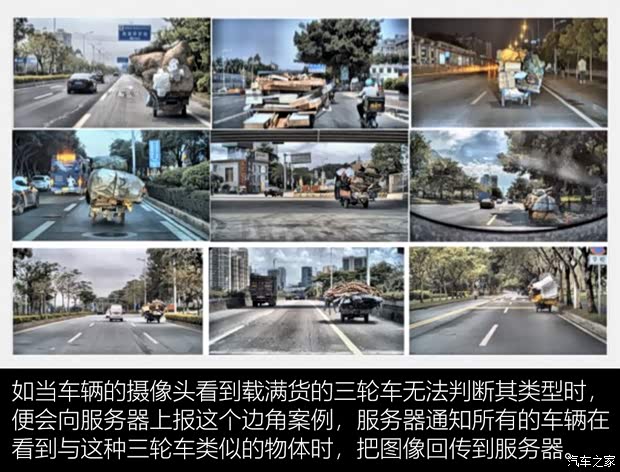
这样服务器就能够收到大量三轮车类似物的图像数据。数据经过标注后,在送入基干网络进行学习便能够提升网络对这种载满货的三轮车的识别率。

据称,XNGP功能每修改一行代码都要经过5000万公里的仿真行驶、5000+个核心模拟场景和17000+个专项模拟场景的考验,确保系统的性能和功能安全性都处于标准之上。
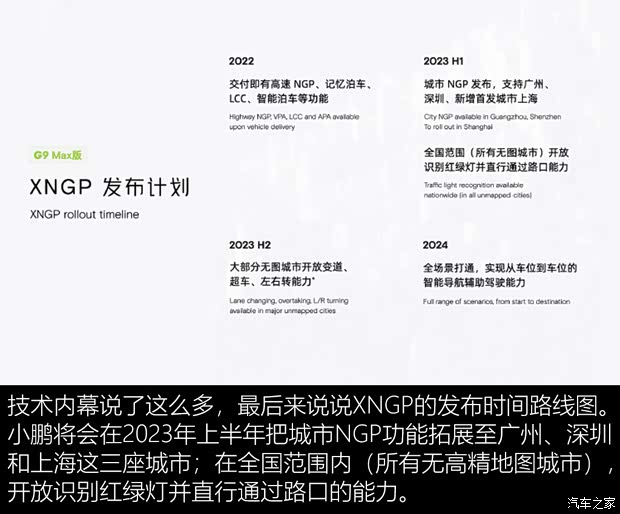
2023年下半年,小鹏将在大部分无高精地图城市开放变道、超车以及左/右转能力。小鹏预计会在2024年内达成全场景导航辅助驾驶,实现从车位到车位的导航驾驶辅助。目前,小鹏旗下只有G9 Max版是采用英伟达Orin平台智能驾驶域控制器,所以G9 Max版的车主会是首批体验XNGP功能的人。
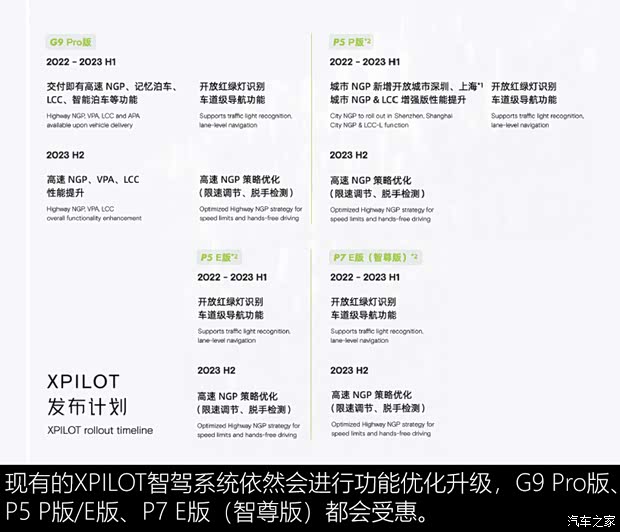
相比起XNGP功能,XPILOT依赖于高精地图数据,在没有高精地图的城市,XPILOT的使用体验不及XNGP。脱离高精地图依赖也是未来一段时间XNGP的核心竞争力所在。

如果这称为现实,Robotaxi运营车和带有XNGP的商品车在路上行驶时采集到的数据就能形成反哺闭环。带有XNGP的商品车采集到的道路数据可以反哺Robotaxi运营车,Robotaxi运营车的自动驾驶能力亦能反哺带有XNGP的商品车。
